
Frequency Stability and Control in Smart Grids
By Hassan Bevrani, Qobad Shafiee, and Hêmin Golpîra
Frequency stability and control is one of the most important problems in interconnected power grids design and operation. Several control loops are operating to maintain the system frequency at its set-point. Each one has its particular specification and relies on a given amount of power reserve that is kept available to cope with power deviations. The majority of supply-demand balancing is achieved by controlling the output of dispatchable generating units.
Today, power grid frequency control regains research interest due to the challenges of increasing renewable energy penetration, changes in traditional structure and emerging new distributed generators (DGs), energy storage systems, controllable loads and power electronics technologies. Recent advances in control, communication and computing technologies accelerate this process. The frequency control in a modern power grid should perform complex multi-objective regulation optimization problems characterized by a high degree of diversification in management policies, and widely distribution in demand and supply sources.
Wide-area measurement systems, integration of DGs/Microgrids (MGs), controllable loads (demand response) and performing virtual inertia provide new concerns and opportunities to handle the frequency control in new power grids. This article reviews the existing power system frequency control structure, most important frequency control challenges and new control possibilities.
Basic Frequency Control Loops
Frequency stability is the ability of a power system to maintain system frequency within the specified operating limits. Generally, frequency instability is a result of a significant imbalance between load and generation, and it is associated with poor coordination of control and protection equipment, insufficient generation reserves, and inadequacies in equipment responses.
A permanent off-normal frequency deviation may affect power system operation, security, reliability and efficiency by damaging equipment, degrading load performance, overloading transmission lines, and triggering the protection devices. Depending on the amplitude and duration of frequency deviation, different frequency control loops may be required to maintain power system frequency stability.
The conceptual frequency response block diagram representing the well-known four frequency control loops (primary, secondary, tertiary and emergency controls), used in large multi-area power system, is shown in Fig. 1. In the presented scheme, ∆Pm is the generator mechanical power change, ∆Ptie is tie-line power change, ACE is area control error, and ∆Pd is the load/generation disturbance; ∆Pp, ∆Ps, ∆Pt and ∆Pe are the control action signals produced by primary, secondary, tertiary and emergency control systems, respectively; ß is the area bias factor, α is participation factor of generating unit in secondary frequency control, and Kp and Ks are the transfer functions/gains of the primary and secondary control loops, respectively. Market operator is responsible to balance the system generation-load in a reliable, secure and economic way. Market operator can change the bulk generators set-point, participation factor and power dispatching through the secondary and tertiary control. It may also trip a generator or run a load shedding algorithm in an emergency condition.
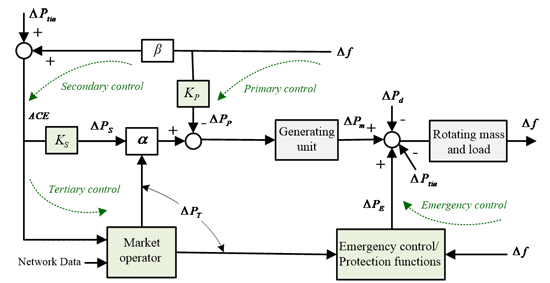
Fig. 1. Conceptual frequency response model with frequency control loops.
The primary control (PC) in synchronous generators (SGs) can automatically attenuate small frequency deviations under normal operation. As soon as the balance is re-established, the system frequency remains at a fixed value, but it may differ from the nominal frequency because the generators droops provide proportional type of action. For larger frequency deviation (off-normal operation), according to the available amount of reserved power, secondary control (SC) which is also known as LFC is responsible to restore system frequency. The LFC as the main component of automatic generation control (AGC), also controls the tie line power deviations in multi-area power systems. For serious imbalanced load-generation associated with rapid frequency changes following a significant fault, the LFC system may be unable to restore frequency. In this situation, another action must be taken using tertiary control (TC), standby supplies, or emergency control (EC) and protection schemes (such as under frequency load shedding-UFLS) as an option to decrease the risk of cascade outages, additional generation events, load/network and separation events.
New Frequency Control Loops
High penetration levels of intermittent renewable energy sources (RESs) in power grids, because of their variability, uncertainty and non-synchronous grid connection, poses several technical challenges. This type of sources increases the need for operational flexibility and reserve requirements. To ensure power system security with high penetration of RESs and MGs, the participation of RESs and MGs in regulation and ancillary services is essential. Recent studies show the technical capability of these fundamental blocks of future smart grids to participate in frequency regulation at a large-scale level. Some utilities have already updated their grid codes to ensure power system security and reliability so that RESs/DGs/MGs are now expected to provide ancillary services and regulation/control supports. Thus, recently many research works have been oriented to the design of new control loops for regulation support of RESs, energy storage systems (ESSs) and MGs.
Moreover, replacement of conventional SGs by power electronic based DGs/RESs reduces system inertia. In areas where the RESs penetration is relatively significant, system operators begin to encounter serious power and frequency control concerns. Inertia emulation and proper shaping of injected active power from controlled power sources are known as promising solutions.
A solution towards improving frequency stability and performance in a grid with numerous low inertia DGs/MGs is to fortify the system with virtual inertia. A virtual inertia (VI) system can be established by using an ESS together with a power electronics converter and a proper control algorithm to emulate the required inertia. A schematic of VI system, as seen from upward point of view, is shown in Fig. 2.
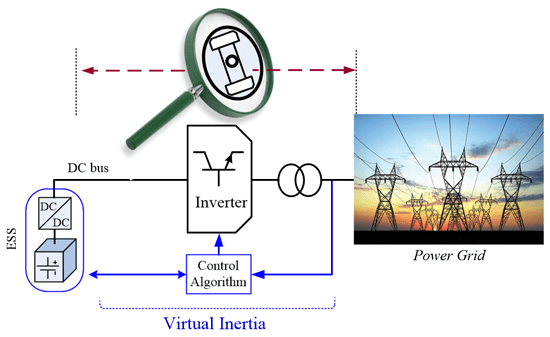
Fig. 2. Schematic of a VI system connected to a power grid.
The demand side may also contribute to the frequency control using self-regulating effect of frequency-sensitive loads, such as induction motors and through the action of frequency-sensitive relays which disconnect some loads at the given frequency thresholds. However, this type of contribution is not always taken into account in the calculation of the overall frequency control response.
Demand response (DR), the idea of controlling loads and flexible demand side units, also introduces some promising schemes to provide ancillary services for frequency regulation purpose. The centralized switching-based control ability of devices on the demand side enables the loads to respond faster to system disturbances, compared to conventional bulk generators. This feature, along with the recent advances in monitoring, computing and communication technologies makes demand-side units as an ideal candidate in frequency regulation.
The DR is the ability to control and manipulate demand side loads to continuously turn them off/on or change their consumption based on situation and in response to power quality, system security, voltage and frequency, technical and economic constraints, applied by grid operators. The main difference of load shedding and demand response in the grid frequency control, is in the continuous demand side participation that can be realized based on smart or innovative methods. Load shedding is applied in off-normal and emergency condition, while DR control is working in normal operation.
Updated Frequency Control Scheme
According to the previous sections, an updated simplified frequency control scheme, including all described frequency control loops and new control possibilities, is conceptually shown in Fig. 3. Considering the operation time, the RESs and MGs are expected to support the grid frequency control in the primary frequency control level of power grids. Injecting active power by the RESs/DGs/MGs in the timescale of hundreds of milliseconds up to a few seconds after an incident of severe load/generation disturbance, they can support the conventional production assets (e.g., SGs) during the activation of their prime reserve. Resiliency and dynamics of future power-electronic based power systems, which mainly rely on variable generating units, could also be enhanced by means of ESSs and DGs. In this way ESSs or wind farms accompanied with the associated power electronic interfaced control loops would be appropriately controlled to emulate virtual inertia. This in turn, supports frequency dynamics in inertial response horizon (see Fig. 3). Fig. 4 shows the contribution of all discussed frequency control loops in timescale of second up to minutes, following a disturbance at t0, to support the modern power system frequency control.
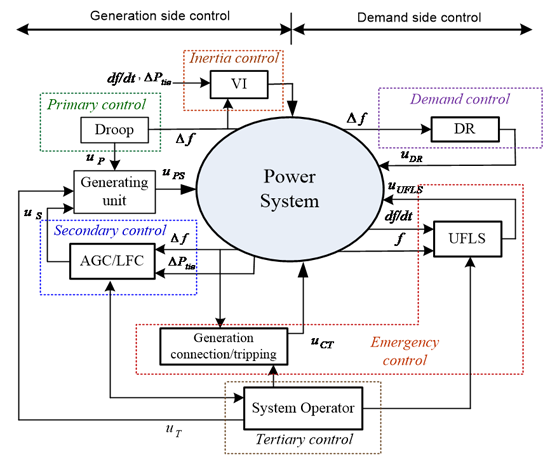
Fig. 3. Frequency control loops in modern power systems.
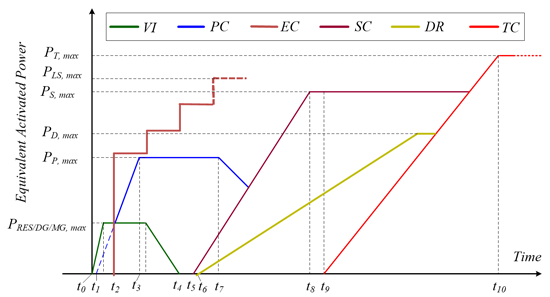
Fig. 4. Activation of frequency control loops following a disturbance at t0.
Conclusion
Frequency stability and control in smart grids faces new technical challenges arising from the increasing penetration of power-electronic-based loads and DGs. Paramount among these, are inertia requirement challenges as inverter-based renewable sources are increasingly replacing synchronous generators. Reduced rotational inertia in the grid may adversely affect grid frequency response and system stability and control. This article addressed most important frequency control capabilities and concerns of modern power system. Impacts of high penetration of renewable energy options, DGs and MGs on system frequency dynamic performance and stability are highlighted. New frequency control opportunities due to regulation supporting of RESs/MGs, virtual inertia and demand response are introduced.
For a downloadable copy of September 2019 eNewsletter which includes this article, please visit the IEEE Smart Grid Resource Center.

Hassan Bevrani (S’90–M’04–SM’08) received PhD degree in electrical engineering from Osaka University (Japan) in 2004. Currently, he is a full professor and the Program Leader of Micro/Smart Grids Research Center-SMGRC at the University of Kurdistan (UOK), Kurdistan (Iran). From 2016 to 2019 he was the UOK vice-chancellor for research and technology. Over the years, he has worked as senior research fellow and visiting professor with Osaka University, Kumamoto University (Japan), Queensland University of Technology (Australia), Kyushu Institute of Technology (Japan), Centrale Lille (France), and Technical University of Berlin (Germany). Prof. Bevrani is the author of 6 international books, 15 book chapters, and more than 300 journal/conference papers. He has been the guest editor of 4 volumes of Energy Procedia and Energy Reports Elsevier journals during 2016-2019. His current research interests include smart grid operation and control, power systems stability and optimization, Microgrid dynamics and control, and Intelligent/robust control applications in power electric industry.

Qobad Shafiee (S’13–M’15–SM’17) received PhD degree in electrical engineering from the Department of Energy Technology, Aalborg University (Denmark) in 2014. He is currently an Assistant Professor, Associate Director of International Relations, and the Program Co-Leader of the Smart/Micro Grids Research Center at the University of Kurdistan, Sanandaj, Iran, where he was a lecturer from 2007 to 2011. In 2014, he was a Visiting Scholar with the Electrical Engineering Department, the University of Texas at Arlington, Arlington, TX, USA. He was a Post-Doctoral Fellow with the Department of Energy Technology, Aalborg University, in 2015. His current research interests include modeling, energy management, control of power electronics-based systems and microgrids, and model predictive and optimal control of modern power systems.

Hêmin Golpîra received the B.Sc., M.Sc., and Ph.D. degrees in electrical engineering in 2007, 2009, and 2014, respectively, all with honors. During 2014 and 2015 He was with the University of Wisconsin-Madison, Wisconsin, USA, as Associate Fellow. In 2016, he joined the University of Kurdistan, Sanandaj, Iran, as assistant professor. During summer of 2019 he was visiting professor with Centrale Lille, France. His current research interests include power system dynamics and stability, renewable energy integration, power system modeling and simulation and wide area monitoring and control.
To have the Bulletin delivered monthly to your inbox, join the IEEE Smart Grid Community.
Past Issues
To view archived articles, and issues, which deliver rich insight into the forces shaping the future of the smart grid. Older Bulletins (formerly eNewsletter) can be found here. To download full issues, visit the publications section of the IEEE Smart Grid Resource Center.
IEEE Smart Grid Bulletin Editors

Managing Editor

Assistant Managing Editor

Interim Managing Editor
IEEE Smart Grid Publications Editorial Board
Mehdi Moghadasi
Mehmet Cintuglu
Geev Mokryani
Jose Medina
Merhrdad Boloorchi
Vigna Kumaran
Hossam Gaber
Jorge Angarita
Ali Nabavi
Vijay Sood
Julio Usaola
Cesar Duarte
Gabriel Ordoñez
Jorge Martinez
Jenny Zhou
Click here for more info
Dr. Panayiotis (Panos) Moutis
Editor-in-Chief
IEEE Smart Grid Bulletin