
Planning of In-motion Electric Vehicle Charging on Freeways
By Ahmed Mohamed, Andrew Meintz, and Kevin Walkowicz
Proper system planning and design of in-motion charging for electric vehicles has the potential to allow vehicles to realize charge-sustaining operation – which we define as unlimited driving range and zero downtime – at minimum overall cost. There is a tradeoff between system power and road coverage. Low-power systems require a significant proportion and extent of roads to be electrified, which increases the infrastructure cost. High-power systems require high-power density components, which require research to overcome existing technology limitations.
The electric vehicle (EV) market is growing quickly because of the benefits they offer in terms of safety, convenience, fuel economy, operating cost, maintenance, and emissions [1]. However, the main challenge for EV adoption is the limited driving range and long refueling time. Manufacturers of light-duty EVs are targeting a driving range of 150-300 miles that result in refueling times ranging from less than 30 minutes to many hours depending on battery and charging technology [2]. One way to overcome limited range is to install a larger onboard battery to reach a target mileage. In this situation, overnight stationary charging may realize a target refueling time. Stationary chargers can be conductive [ac level 1 (L1), ac level 2 (L2) or dc fast charger (DCFC)] or wireless [based on inductive power transfer (IPT) or capacitive power transfer (CPT) technology], as indicated in Fig. 1 [3]. The large battery may increase the vehicle capital and operating costs particularly if travel or circumstance require extreme fast charging for a reasonable recharge time. Another solution is to deploy in-route charging. In this scenario, EVs can charge during transit stops (quasi-dynamic charging at traffic signals and/or intersections) or even while moving (in-motion charging) [4]. Both dynamic and quasi-dynamic technologies can be either conductive or wireless, as described in Fig. 1. This solution has the potential to dramatically extend driving range (possibly to infinity), permit use of a smaller battery (consequently reducing the vehicle’s cost, size and energy consumption), and theoretically eliminate recharge downtime (by realizing charge-sustaining operation) [5]. Quasi-dynamic charging is appropriate for secondary roadways due to the availability of transient stops and low-speed driving areas. In this case, a vehicle will be able to recover enough energy with low power charging and low coverage infrastructure. However, on primary roadways (highways, interstates, etc.) with continuous high-speed driving, only in-motion charging is suitable[4]. In-motion charging is a technology that allows an EV to charge during movement by electrifying roadway segments, either by using overhead power lines with a pantograph, conductive rails with sliding contacts, or wireless charging technology, as depicted in Fig. 1 [6].
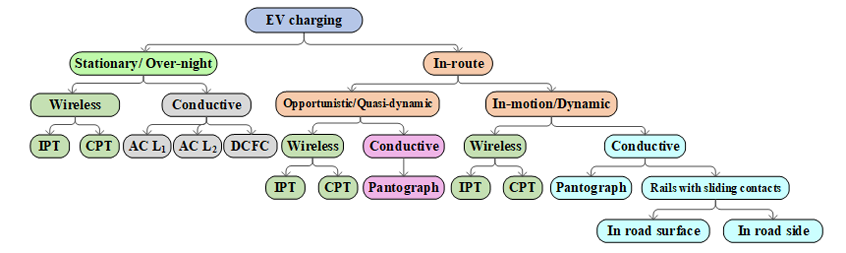
Fig. 1: EV charging technologies.
Planning of In-motion Charging System
Regardless of the road electrification technology, proper design of an in-motion charging system may allow EVs to achieve unlimited range and zero downtime using a smaller battery. In addition, in-motion charging may reduce the combined capital cost associated with infrastructure (power converters, materials, structure work, installation, etc.) and the vehicle fleet (battery size, efficiency, number of vehicles, etc.) by increasing vehicle effective range and operating hours.
Energy supplied by an in-motion charger is a function of charger power, electrified segment length, and driving speed. To meet a certain vehicle’s need (energy and speed), options range from a high-power charging system with low-coverage to a low-power charging system with high-coverage. Proper planning for the system is crucial to decide the appropriate power level, road coverage [ratio of electrified segments length and total road length (δ)], and length of electrified segments. The main objective for the system design is to allow EVs to realize charge-sustaining operation at minimum overall cost. Therefore, a linear energy estimation model for charge-sustaining operation is developed, considering vehicle dynamics and charger power, as shown in Fig. 2. In this case, the vehicle’s battery sustains a fixed energy level with a narrow SOC operating window (ΔSOC=10-20%). The model involves the vehicle’s energy consumption (kWh/mile), driving speed, battery capacity (Qb), length of electrified segment [LE (mile)], and charger power (Pc).
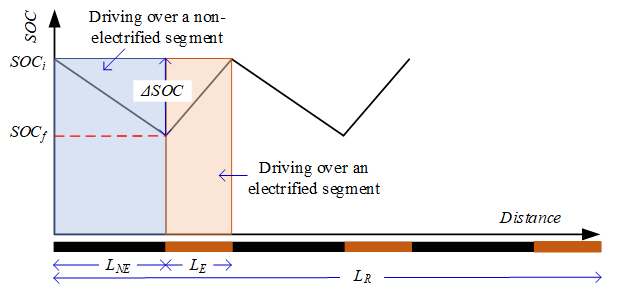
Fig. 2: Linear energy model for charge-sustaining operation.
A Case of Study
Among the different in-motion charging technologies, dynamic wireless charging has several advantages: 1) it can be used with different vehicle types, 2) it doesn’t have visual impact, and 3) it is safer due to the removal of exposed energized conductors and mechanical connection. A planning analysis of dynamic wireless EV charging system is achieved by solving the charge-sustaining model in Fig. 1 for passenger cars on primary roadways where most vehicle mile travel is concentrated in the U.S. [7]. The average vehicle kWh/mile and driving speed are estimated using real-world data available at the National Renewable Energy Laboratory (NREL) [8].
The relationship between the key system design parameters (δ, Pc and Qb) is described in Figs. 3-5. For example, at a fixed battery capacity (e.g. Qb=30 kWh) and given vehicle energy efficiency (e.g. 310 Wh/mile), the system road coverage is inversely proportional to the charging power (Fig. 3). This means a high-power system requires less road coverage and therefore less construction and materials. The variation of road coverage with battery capacity for a fixed charging power (e.g. Pc=100 kW) is presented in Fig. 4, which shows a linear relationship with increased vehicle mass. Higher Qb requires more road coverage to compensate for the increase in the vehicle’s energy consumption. The three design parameters are analyzed in Fig. 5, which shows that increasing Pc and reducing Qb leads to the least road coverage and infrastructure cost. However, increasing charging power while decreasing battery capacity requires batteries that can handle higher charging rates.
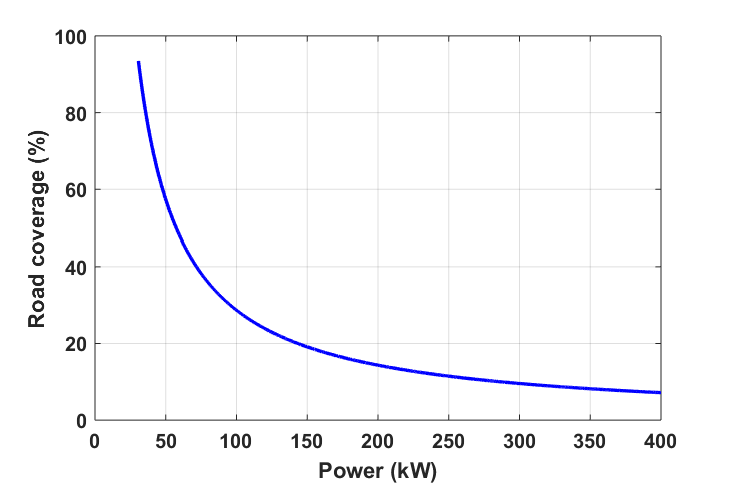
Fig. 3: Road coverage vs. charging power @ Qb=30kWh
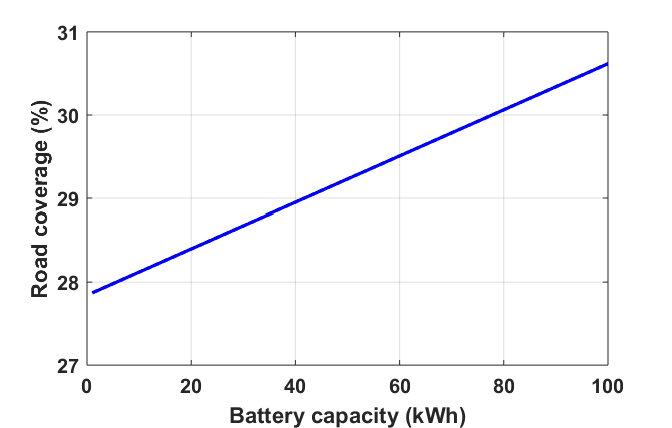
Fig. 4: Road coverage vs. battery capacity @ Pc=100 kW.
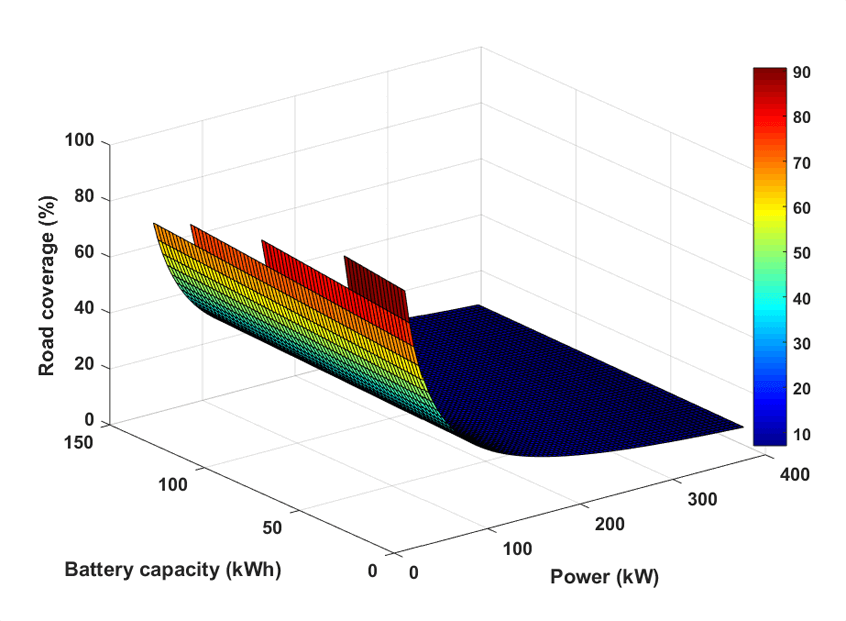
Fig. 5: Road coverage, charging power and battery capacity.
Conclusion
This article summarized different charging technologies for EVs, including stationary, dynamic, and quasi-dynamic. It highlighted the challenges of system design of dynamic charging using a linear energy model for charge-sustaining operating. Planning of dynamic wireless charging for passenger cars on highways was investigated as a case study. The results show that low-power systems require high road coverage, which increases the infrastructure cost. High-power systems can significantly reduce road coverage but requires high-power density components which require research to overcome existing technology limitations.
References
- J. Clairand, J. Rodríguez-García, and C. Álvarez-Bel, “Smart Charging for Electric Vehicle Aggregators Considering Users’ Preferences,” IEEE Access, vol. 6, pp. 54624–54635, 2018, doi: 10.1109/ACCESS.2018.2872725.
- Clean Cities U.S. Departmnet of Energy, “Plug-In Electric Vehicle Handbook for Fleet Managers,” Clean Cities U.S. Departmnet of Energy, Apr. 2012.
- D. Kettles, “Electric Vehicle Charging Technology Analysis and Standards,” Florida Solar Energy Center, FSEC-CR-1996-15, Feb. 2015.
- A. A. S. Mohamed, C. R. Lashway, and O. Mohammed, “Modeling and Feasibility Analysis of Quasi-Dynamic WPT System for EV Applications,” IEEE Transactions on Transportation Electrification, vol. 3, no. 2, pp. 343–353, Jun. 2017, doi: 10.1109/TTE.2017.2682111.
- A. A. S. Mohamed, L. Zhu, A. Meintz, and E. Wood, “Planning Optimization for Inductively Charged On-demand Automated Electric Shuttles Project at Greenville, South Carolina,” IEEE Transactions on Industry Applications, pp. 1–1, 2019, doi: 10.1109/TIA.2019.2958566.
- J. Suul and G. Guidi, “Technology for dynamic on-road power transfer to electric vehicles,” 2018.
- “Annual Vehicle Distance Traveled in Miles and Related Data - 2000 - Table VM-1.” [Online]. Available: https://www.fhwa.dot.gov/ohim/hs00/vm1.htm. [Accessed: 30-Jan-2019].
- “About the Transportation Secure Data Center | Transportation Secure Data Center | NREL.” [Online]. [Accessed: 30-Jan-2019].
For a downloadable copy of February 2020 eNewsletter which includes this article, please visit the IEEE Smart Grid Resource Center.
Ahmed A S Mohamed received his B.Sc. and M.Sc. degrees in Electrical Engineering from the Electrical Power and Machines Department, ZU, Egypt, in 2008 and 2012, respectively. He finished his Ph.D. degree in Electrical Engineering at Florida International University (FIU), Miami, FL, USA, in December 2017.
Dr. Mohamed is currently a Research Engineer in the Advanced Vehicles & Charging Infrastructure Group at the National Renewable Energy Laboratory (NREL), Golden, CO, USA. From 2008 to 2013, Dr. Mohamed served as a faculty member at ZU, Egypt. His research focus on wireless power transfer systems, power electronics, transportation electrification, as well as PV power systems. Dr. Mohamed is a Senior IEEE member and he was a recipient of the Outstanding Doctoral Student Award in fall 2017 from FIU.

Kevin Walkowicz manages the Advanced Vehicle and Charging Infrastructure Group within NREL’s Center for Integrated Mobility Sciences at the National Renewable Energy Laboratory. He leads efforts to develop and implement innovative research approaches to reduce transportation energy consumption and increase the use of domestic renewable resources in the transportation industry. His work focuses on conducting laboratory and in-use research, characterizing data and developing analysis, simulation & visualization tools. His work will ultimately help to assess the impacts and opportunities for improved efficiency of advanced technology medium and heavy-duty vehicle + infrastructure technology. While at NREL, a primary focus of his has been on understanding vehicle operations, assessing electric vehicle efficiency and characterizing fueling and recharging operations through duty cycle analysis. Prior to joining NREL he worked at General Motors Corporation leading emission control development projects. He holds a B.S.M.E from Lawrence Technological University and a M.S. in engineering from Rensselaer Polytechnic Institute.
To have the Bulletin delivered monthly to your inbox, join the IEEE Smart Grid Community.
Past Issues
To view archived articles, and issues, which deliver rich insight into the forces shaping the future of the smart grid. Older Bulletins (formerly eNewsletter) can be found here. To download full issues, visit the publications section of the IEEE Smart Grid Resource Center.
IEEE Smart Grid Bulletin Editors

Managing Editor

Assistant Managing Editor

Interim Managing Editor
IEEE Smart Grid Publications Editorial Board
Mehdi Moghadasi
Mehmet Cintuglu
Geev Mokryani
Jose Medina
Merhrdad Boloorchi
Vigna Kumaran
Hossam Gaber
Jorge Angarita
Ali Nabavi
Vijay Sood
Julio Usaola
Cesar Duarte
Gabriel Ordoñez
Jorge Martinez
Jenny Zhou
Click here for more info
Dr. Panayiotis (Panos) Moutis
Editor-in-Chief
IEEE Smart Grid Bulletin